Training Course on Adaptive Control and Robust Control Systems
Training Course on Adaptive Control and Robust Control Systems is engineered to provide a deep dive into advanced control methodologies that enable systems to perform optimally despite uncertainties, disturbances, and changing operating conditions.
Course Overview
Training Course on Adaptive Control and Robust Control Systems
Introduction
Master the art of designing resilient and intelligent control systems with our comprehensive training course on Adaptive Control and Robust Control Systems. Training Course on Adaptive Control and Robust Control Systems is engineered to provide a deep dive into advanced control methodologies that enable systems to perform optimally despite uncertainties, disturbances, and changing operating conditions. Participants will gain expertise in handling model-plant mismatch, parametric variations, and unmodeled dynamics, crucial for developing autonomous and highly reliable systems in complex industrial environments. This course bridges theoretical foundations with practical applications, equipping attendees with the skills to address real-world control challenges in demanding scenarios.
This intensive course is designed for engineers, researchers, and control professionals seeking to innovate in the realm of advanced automation, smart manufacturing, and autonomous systems. We will cover cutting-edge topics such as self-tuning regulators, model-reference adaptive control (MRAC), gain scheduling, H-infinity control, quantitative feedback theory (QFT), and sliding mode control. Participants will learn to implement strategies that guarantee stability, performance, and fault tolerance, even in the face of significant uncertainties. Join us to elevate your expertise in developing the next generation of intelligent control systems that are both adaptable and impervious to unforeseen challenges.
Course duration
10 Days
Course Objectives
- Understand the fundamental challenges posed by uncertainties and disturbances in control system design.
- Differentiate between adaptive control and robust control philosophies and their respective applications.
- Design and implement Self-Tuning Regulators (STRs) for systems with unknown or varying parameters.
- Develop Model-Reference Adaptive Control (MRAC) systems to achieve desired closed-loop behavior despite plant uncertainties.
- Apply gain scheduling techniques for non-linear and widely varying operating conditions.
- Formulate and solve H-infinity control problems to achieve robust performance and disturbance rejection.
- Utilize Quantitative Feedback Theory (QFT) for designing robust controllers in the face of significant plant uncertainty.
- Implement Sliding Mode Control (SMC) for highly robust performance against parameter variations and disturbances.
- Analyze the stability and performance of adaptive and robust control systems using advanced tools.
- Employ system identification techniques specifically for adaptive control applications.
- Evaluate the trade-offs between performance and robustness in control system design.
- Integrate adaptive and robust control strategies into autonomous systems and smart industrial applications.
- Troubleshoot and fine-tune complex adaptive and robust control systems in real-world scenarios.
Organizational Benefits
- Enhanced System Reliability: Reduced downtime due to the ability to handle uncertainties.
- Improved Performance in Variable Conditions: Systems that maintain optimal operation despite changes.
- Reduced Maintenance Costs: Self-adapting systems require less manual retuning.
- Increased Safety Margins: Robust controllers provide predictable behavior under various conditions.
- Optimized Process Efficiency: Adaptability leads to continuous performance improvement.
- Competitive Advantage: Deployment of state-of-the-art intelligent control solutions.
- Faster Response to Disturbances: Systems that can quickly adapt to unexpected events.
- Skilled Workforce: Engineers capable of designing and managing highly advanced control systems.
- Support for Autonomous Operations: Foundation for fully self-regulating systems.
- Resilience to Future Changes: Systems built to handle unforeseen operational shifts.
Target Participants
- Control Systems Engineers
- Automation Engineers
- Robotics Engineers
- Aerospace Engineers
- Chemical Engineers
- Electrical Engineers
- Researchers and Academics in control theory.
- R&D Engineers working on advanced control solutions.
- Technical Managers overseeing complex control projects.
Course Outline
Module 1: Introduction to Control Under Uncertainty
- Challenges of Real-World Systems: Unmodeled dynamics, parameter variations, disturbances.
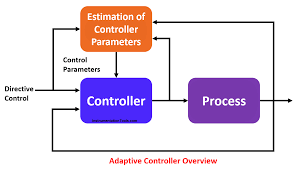
- Defining Adaptive Control: Systems that adjust their behavior dynamically.
- Defining Robust Control: Systems designed to tolerate specified uncertainties.
- The Need for Advanced Control: Beyond classical PID in uncertain environments.
- Case Study: Performance comparison of a PID controller versus an initial robust design on a system with varying load.
Module 2: Review of Classical and Modern Control Fundamentals
- System Modeling and Representation: Transfer functions, state-space models.
- Stability Analysis: Nyquist, Bode, Root Locus, Lyapunov stability.
- Performance Specifications: Rise time, overshoot, steady-state error.
- Introduction to Optimal Control: Brief overview of LQR.
- Case Study: Analyzing the stability and performance of a baseline control system.
Module 3: Introduction to Adaptive Control Theory
- Motivation for Adaptation: Dealing with unknown or time-varying parameters.
- Key Concepts: Parameter estimation, adaptation laws, persistent excitation.
- Direct vs. Indirect Adaptive Control: Different approaches to adaptation.
- Model Identification for Adaptive Control: Recursive least squares.
- Case Study: Simple example of a system with changing parameters and how adaptation helps.
Module 4: Self-Tuning Regulators (STRs)
- Principle of STRs: Combining system identification and controller design.
- Implicit and Explicit STRs: Different architectures.
- Recursive Least Squares (RLS) for Parameter Estimation: Algorithm details.
- Controller Design based on Estimated Parameters: Pole placement, minimum variance control.
- Case Study: Designing an STR for a process with unknown and slowly varying gain.
Module 5: Model-Reference Adaptive Control (MRAC)
- Reference Model Design: Specifying desired closed-loop dynamics.
- Adaptation Mechanism Design: Lyapunov stability approach for parameter updates.
- Input Error and Output Error Formulations: Different MRAC structures.
- Stability Proofs and Challenges: Ensuring convergence and robustness.
- Case Study: Implementing an MRAC system for a DC motor with unknown friction.
Module 6: Gain Scheduling and Adaptive Techniques in Practice
- Concept of Gain Scheduling: Varying controller parameters based on operating conditions.
- Design Considerations for Gain Scheduling: Scheduling variables, interpolation.
- Hybrid Adaptive Schemes: Combining MRAC/STR with gain scheduling.
- Practical Implementation Issues: Online tuning, robustness.
- Case Study: Applying gain scheduling to an aircraft control system for different flight regimes.
Module 7: Introduction to Robust Control Theory
- Sources of Uncertainty: Parametric uncertainty, unmodeled dynamics, external disturbances.
- Modeling Uncertainty: Additive, multiplicative, and inverse multiplicative uncertainty.
- Robust Stability and Robust Performance: Definitions and objectives.
- Small Gain Theorem: A fundamental robust stability criterion.
- Case Study: Characterizing the uncertainty in a mechanical system with varying load.
Module 8: H-infinity Control Theory
- Norms in Control Theory: H2 norm, H-infinity norm.
- Problem Formulation: Minimizing the worst-case effect of disturbances.
- Loop Shaping with H-infinity: Designing the frequency response for robustness.
- Controller Synthesis (Ricatti Equations): Mathematical tools for H-infinity design.
- Case Study: Designing an H-infinity controller for an inverted pendulum to suppress disturbances.
Module 9: Quantitative Feedback Theory (QFT)
- Uncertainty Templates and Nichols Chart: Graphical design tool for QFT.
- Robustness Specifications in Frequency Domain: Achieving performance despite uncertainty.
- Loop Shaping in QFT: Designing the controller to satisfy bounds.
- Advantages and Limitations of QFT: Practical application.
- Case Study: Applying QFT to a flexible robotic arm for robust vibration suppression.
Module 10: Sliding Mode Control (SMC)
- Concept of Sliding Surface: Desired system behavior.
- Reaching Phase and Sliding Phase: Dynamics of SMC.
- Robustness of SMC: Insensitivity to matched uncertainties.
- Chattering Phenomenon and Mitigation: Practical issues and solutions.
- Case Study: Designing a sliding mode controller for a system with significant parameter variations and external disturbances.
Module 11: Linear Matrix Inequalities (LMIs) in Robust Control
- Introduction to LMIs: Convex optimization problems.
- LMI Formulations for Robust Stability and Performance: Relaxations of H-infinity.
- Solving LMIs: Numerical tools and software.
- Applications of LMIs: Robust controller synthesis, filter design.
- Case Study: Using LMI toolbox to design a robust state-feedback controller.
Module 12: Adaptive and Robust Control for Autonomous Systems
- Adaptive Cruise Control: Handling varying vehicle parameters and road conditions.
- Robust Trajectory Tracking for Mobile Robots: Dealing with slippage and environmental uncertainties.
- Adaptive Control for Drone Flight: Compensating for payload changes and wind gusts.
- Fault-Tolerant Control: Maintaining performance despite component failures.
- Case Study: Designing an adaptive controller for an autonomous underwater vehicle (AUV) operating in varying currents.
Module 13: Practical Considerations and Implementation Challenges
- Computational Burden: Real-time requirements for complex algorithms.
- Sensor Noise and Actuator Limitations: Impact on performance.
- Tuning and Commissioning: Practical guidelines for deployment.
- Hybrid Control Architectures: Combining adaptive/robust with other control strategies.
- Case Study: Addressing implementation challenges of an adaptive control system on a physical test rig.
Module 14: System Identification for Advanced Control
- Parametric vs. Non-parametric Models: Different approaches to modeling.
- Input Signal Design: Exciting system dynamics for identification.
- Model Validation Techniques: Assessing model accuracy.
- Online Identification for Adaptive Control: Continuous parameter estimation.